System FPV powiększa się o kolejny czujnik, tym razem do pomiaru prędkości względem powietrza. Pomiar oparty jest na szwajcarskim czujniku MS4525D5AI001D, pierońsko drogim, ale najlepszym w swojej klasie. Na płytce jest układ zasilający pozwalający na pracę od 3,5 do 10V tak aby uniezależnić się od zmian napięcia na magistrali serw.
Wrzuciłem to do sklepu jako czujnik prędkości względem powietrza. Osobno można zamówić samą rurkę Pitota jako zapasową lub gdyby ktoś zdecydował się przekładać czujnik między modelami.
Czujnik ma domyślnie 25cm przewód z żółtą wtyczką do złącza I2C w OSD. Gdyby ktoś potrzebował inną długość to proszę o informację w komentarzu do zamówienia. Wężyk silikonowy do rurki Pitota ma 75cm. Trzeba go przeciać na 2 części, tak aby połączyć wyjścia ciśnienia całkowitego i statycznego z odpowiednimi portami w czujniku. Porty są opisane na płytce. Gdyby ktoś się pomylił to co najwyżej będzie miał ujemną prędkość na ekranie. Nie wiem jak Zbig to zrobił, ale potrafi policzyć pierwiastek z liczb ujemnych! (Dla niewtajemniczonych: prędkość jest pierwiastkiem z ciśnienia dynamicznego czyli różnicy całkowitego i statycznego). Niestety czujnik mierzy prędkość tylko w locie do przodu, nie działa na wstecznym ani w locie bokiem.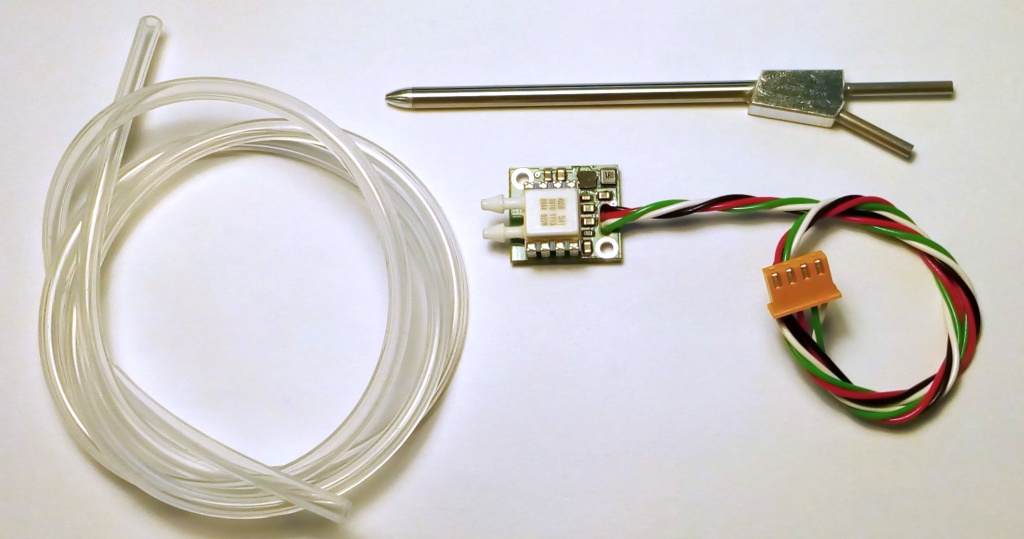
![]() Po długich testach publikujemy kolejny komplet oprogramowania dla zespołu urządzeń wchodzacych w skład Systemu FPV. Na tą wersję składa się bardzo dużo drobnych udoskonaleń zamawianych przez użytkowników i wypracowanych w czasie eksploatacji.
Po długich testach publikujemy kolejny komplet oprogramowania dla zespołu urządzeń wchodzacych w skład Systemu FPV. Na tą wersję składa się bardzo dużo drobnych udoskonaleń zamawianych przez użytkowników i wypracowanych w czasie eksploatacji.
Nowościami są możliwość dywersyfikacji sterowania RC z dwu odbiorników z wyjściami CPPM lub S-Bus. Nowa jest też metoda kalibracji czujnika prądu, pozwalająca na minimalizację błędów pomiaru.
Opis wszystkich zmian wersji 2.60 w języku angielskim można przeczytać w linkowanym tutaj dokumencie.
Artykuł o dywersyfikacji sterowania RC [EN]
Artykuł o kalibracji czujnika pradu [EN]
Pliki z nowym oprogramowaniem można pobrać z działu System FPV -> Do pobrania
Kolega Piotr napisał kilkuczęściowy artykuł o FPV, który ukaże się w kilku najbliższych wydaniach Modelarza. Samolot opisywany w artykule jest wyposażony w nasz System FPV. Zapraszam do lektury.
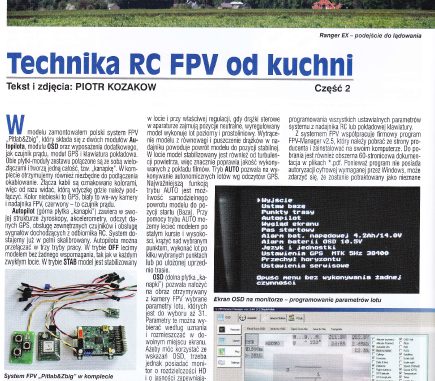
Samoloty testowane w artykule będące nośnikami System FPV są opisane przez autora artykułu na forum modelarskim. Są to Ranger EX 2.0 m FPV oraz 2600 FPV. Można tam doczytać mnóstwo szczegółów konstrukcyjnych i eksploatacyjnych oraz zadać pytanie autorowi.
Tegoroczną noc muzeów spędziliśmy na Mińskiej 65 gdzie pod patronatem PAP odbywała się wystawa "Zadziwiające technologie".
W wielkiej postindustrialnej hali, obok kilkunastu innych wystawców prezentowaliśmy nasz System FPV.

Po wielu testach zwieńczonych trzema wersjami Release Candidate oddajemy w Wasze ręce nową wersję kompletu firmware i oprogramowania Systemu FPV. Główną ideą tej wersji jest zwiększenie automatyzacji obsługi lotu od planowania złożonej trasy po samodzielny start i lądowanie.
Najważniejsze cechy wersji 2.50 w punktach:
- Dodano nowe tryby pracy i nowe składowe trasy,
- Dodano wielosegmentowe trasy lotu,
- Dodano wsparcie dla startu umożliwiające utrzymanie równego lotu pod zadanym kątem wznoszenia,
- Dodano automatyczne lądowanie za zdefiniowanym lotnisku bez konieczności zaangażowania pilota,
- Nowe opcje stabilizacji pochylenia i przechylenia
- Dodano stabilizację kursu
- Dodano monitor stanu pokazujący stan do 5 kanałów RC
- Dodano widok historii zmiany wysokości
- Dodano ignorowanie powrotu do bazy przez określony czas po zaniku sygnału RC
Szczegółowy opis nowej funkcjonalności znajdziecie w poniższych dokumentach (po angielsku):
Description of new functions in version 2.50
Automated landing in FPV System
Navigation modes in FPV System
Nowe pliki są do pobrania jak zwykle w dziale System FPV -> Do pobrania
Aplikacja FPV Tracker na system Android pozwala na monitorowanie na mapie Google bieżącej pozycji samolotu wyposażonego w System FPV. Aplikacja pobiera bieżące dane ze Stacji Naziemnej. Możliwe jest też definiowanie nowej trasy w warunkach terenowych i wysłanie jej bezpośrednio do OSD. Aplikacja może być pobrana ze sklepu Google Play. Więcej informacji można znaleźć w dokumentacji podręczniku użytkownika (EN).
![]()
