Filtr Kalmana jest ciekawym narzędziem pozwalającym filtrować dane znacznie lepiej niż innymi filtrami. W naszej branży aż się prosi o jego użycie, dlatego warto o nim porozmawiać i lepiej go poznać bo jest to potężne, ale niezbyt proste narzędzie.
W porównaniu do "zwykłych filtrów", które przepuszczają przez siebie dane nic o nich nie wiedząc, filtr Kalmana oparty na modelu danego zjawiska. Jednocześnie filtruje dane wchodzące do modelu mierząc ich parametry statystyczne (wariancję) a także na podstawie tych danych tworzy model i liczy błąd predykcji następnego stanu modelu. Następnie przyjmuje wagi nazywane współczynnikiem Kalmana "K", przez które przemnaża dane wchodzące do procesu w fazie tak zwanej korekcji, oraz przemnaża przez odwrotność współczynnika (1-K) dane szacowane następnego stanu modelu. W zależności do wartości współczynnika, następny stan modelu będzie polegał bardziej na pomiarach lub na predykcji. Jeżeli dane wchodzące do procesu będą obarczone dużym szumem (ich wariancja będzie wysoka) to model będzie polegał bardziej na wartościach z predykcji. I odwrotnie jeżeli dane będą czyste a wyliczany model będzie miał dużą wariancję, wtedy filtr będzie bardziej polegał na danych pomiarowych.
Opierając się na opracowaniu Remiego wykonałem rurkę Pitota, która będzie będzie latała w EG jako dajnik ciśnienia do liczenia prędkości pneumatycznej IAS. Do tej pory latałem ze zwykłym kawałkiem rurki 3mm co mi dawało ciśnienie całkowite a statyczne brałem z kadłuba. W zależności od pneumatyki kadłuba ciśnienie tam panujące niekoniecznie musi równać się statycznemu. Teraz pomiary prędkości powinny być obarczone mniejszym błędem.
Jeden z kolegów zapytał się mnie o czujnik prądu 100A dostosowany do OSD Misia o napięciu referencyjnym przetwornika wynoszącym 2,5V. Jeżeli będzie potrzeba to mogę wprowadzić taki czujnik do oferty, ale chciałbym przestawić tutaj sposób jak można manewrować wartościami elementów aby osiągnąć zamierzone parametry czujnika. Dotyczy to zwłaszcza doboru napięcia wejściowego przetwornika, bo każdy projekt może mieć inne wymagania. Na schemacie liczyłem wartości dla napięcia wyjściowego wynoszącego 5V.
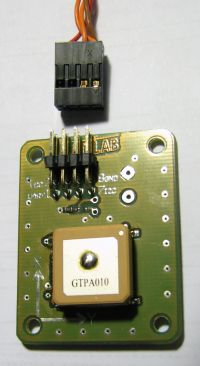
Moduł GPS jest źródłem informacji o położeniu geograficznym, prędkości względem ziemi oraz alternatywnym źródłem wysokości i kursu. W wersji 1.0 moduł GPSu był modułem wewnętrznym jednak ze względu na konieczność umieszczania komputera w środku ciężkości modelu latającego gdzie nie zawsze są odpowiednie warunki do odbioru sygnału radiowego, od wersji 2.0 jest modułem zewnętrznym. W celu ochrony przed czynnikami atmosferycznymi jest przystosowany do umieszczenia w obudowie Z-47U.
Moduł zawiera 10 Hz, 66-kanałowy odbiornik GPS oparty o chipsecie MTK MT3339. Na zdjęciu nie ma jeszcze zamontowanego kondensatora podtrzymującego zasilanie oraz LED sygnalizującej stan odbiornika.W zależności od tego czy płytka jest umieszczona w obudowie LED jest w wersji przewlekanej (wystającej z obudowy) lub SMD. Kondensator w wersji bez obudowy jest montowany na wierzchu lub w wersji obudowanej pod spodem.
Podczas kilkuletniej eksploatacji SkyAssistanta nauczyłem się dostrzegać kilka zjawisk, które z początku nie były dla mnie oczywiste a mają zauważalny wpływ na pracę urządzenia. Chciałbym zwrócić uwagę na następujące zjawiska:
- wpływ światła słonecznego na wskazanie czujnika ciśnienia,
- wpływ światła słonecznego na sposób umieszczenia SA w kadłubie,
- wpływ sił odśrodkowych na sposób umieszczenia SA w kadłubie,
- wpływ sondy kompensacyjnej TEK na wskazania wysokościomierza.
Zmiany te są opisane na przykładzie moich urządzeń, ale to są zjawiska mające wpływ na wszystkie urządzenia działające na podobnej zasadzie.
Czytaj więcej: Sztuczki i kruczki - aby lepiej zrozumieć SkyAssistanta
