Dawno, dawno temu, był sobie chłopiec, który pomimo trzydziestki+ na karku zaczynał swoją przygodę z modelarstwem. Gdy już pierwszy model pochłonął butlę żywicy i domagał się przejścia na emeryturę, Mikołaj na gwiazdkę przyniósł mu prawdziwy szybowiec RC. Piękny! Z błyszczącym laminatowym kadłubem, fornirowymi skrzydłami. Szybowiec wymagał jeszcze sporo pracy: montażu serw i haka do holu, lakierowania skrzydeł, wyważania. Gdy już został wykończony i można było wyjść na łąkę, odwdzięczył się rewelacyjną doskonałością dając mnóstwo frajdy.
W tym czasie nie było jeszcze małych i wydajnych silników 3-fazowych ani baterii polimerowych a pojemność kadłuba i ograniczone umiejętności manualne nie pozwalały na przerobienie szybowca na elektroszybowiec. Zostawał gumowy hol, który pozwalał wywindować szybowiec na dosyć ograniczoną wysokość. Pojawiło się pytanie: na jaką i jak strzelać z gumy aby wyciągnąć go wyżej?
W tym czasie udało się otrzeć o niemalże magiczną, niewidzialną siłę ciągnącą model do góry - o termikę. Ze wszystkimi niewidzialnymi rzeczami jest problem, bo ciężko jest używać czegoś czego się nie widzi. Prąd też jest niewidzialny, ale mając miernik można zmierzyć jago napięcie i natężenie. Mając lepsze narzędzie - oscyloskop można nawet obejrzeć jego zmianę w czasie, uchwycić na ekranie bardzo krótką chwilę zmiany. Podobnie fale radiowe, mając odbiornik można je usłyszeć, mając lepsze narzędzie - analizator widma można zobaczyć na ekranie moc, częstotliwość, szerokość nadawania. Bez narzędzi te zjawiska są jak magia.
Podobnie jest z noszeniem. Można przekonać się o tym że istnieje, tak jak językiem można sprawdzić czy pakiet jest naładowany, ale żeby znaleźć noszenie, ocenić je i utrzymać potrzebne jest narzędzie albo wiele lat doświadczenia.
Jeden z niewielu weekendów spędzonych w domu dał szansę na zarejestrowanie lotu kopterów. Zwykle latam sam na trochę większym placu, ale z okazji weekendu było tam za dużo ludzi, więc wybraliśmy się z synem na puste boisko szkolne.
W pierwszej kolejności lataliśmy Hexakopterem:
Następnie lataliśmy Quadrokopterem
W PitLab.Sklepie są już dostępne kompletne zestawy zawierające OSD, Autopilota oraz OSD i Autopilota razem. Wprowadziłem je po czasie umożliwiającym rozpoznanie potrzeb pierwszych użytkowników. W dalszym ciągu można samemu skomponować zamówienie z elementów składowych, wtedy zestawy pełnią rolę przykładów kompletacji.
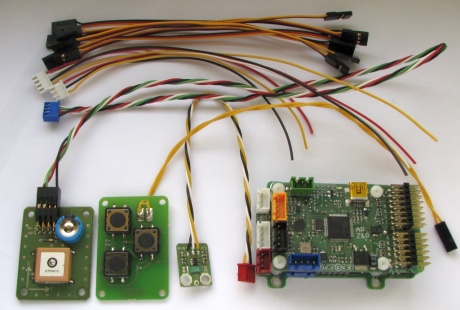
Pełny komplet (pełny na obecną chwilę, bo docelowo będzie zawierał jeszcze sterownik anteny śledzącej) składa się z kanapki OSD i AP połączonych poliamidowymi kołkami dystansowymi, czujnik prądu 50A, klawiaturę do nawigacji po menu OSD, moduł odbiornika GPS, kable do kamery, do nadajnika AV, do GPS oraz 7 kabli do odbiornika RC.
W ostatnim czasie w sklepie pojawiła się rurka Pitota do pomiaru prędkości względem powietrza

W następnych kilku tygodniach pojawi się moduł różnicowego czujnika ciśnienia współpracującego z sondą.
Pojawił się też moduł Bluetooth przeznaczony do komunikacji bezprzewodowej z komputerem AutoPitLot

Dodałem też dział układów scalonych w którym oferuję nadwyżki produkcyjne. Kilka elementów np, magnetometry są unikalne i trudne do kupienia gdzie indziej. Wyprzedaję też w okazyjnych cenach układy jakie zostały mi po wcześniejszych wersjach urządzeń, seriach testowych itp. Szkoda trzymać ich w szufladzie a być może komuś jeszcze się przydadzą
Wróciłem z XII Międzynarodowego Pikniku Modelarskiego na górze Żar w Międzybrodziu Żywieckim. Jest to od lat największa impreza szybowcowa w kraju.


{kind=link}
Wystartowaliśmy z testami beta modułu autopilota przeznaczonego dla OSD. Autopilot (AP) wzbogaca OSD o sztuczny horyzont, kurs magnetyczny, wysokość barometryczną i wariometr. Dodatkowo stabilizuje samolot, daje możliwość automatycznego powrotu do bazy przy zaniku sterowania RC oraz lot po waypointach. Podstawowa konfiguracja AP jest z poziomu OSD. Rzeczy takie jak kalibracja czy zmiana firmware wykonuje się przy użyciu aplikacji PC, do której podłączamy się przez złącze USB.

Moduł AP montuje się na OSD przy pomocy 2 złącz szpilkowych i 4 poliamidowych kołków. Płytka AP zakrywa złącza GPS i UARTA w OSD. Złącze GPS na płytce AP jest wewnętrznie połączone ze złączem GPS w OSD aby urządzenia współdzieliły odbiornik między siebie.
Zasilany jest z napięcia 5V dla serw. Odczytuje kanały z 7 wejść podłączonych do odbiornika i steruje 5 kanałami (kanał 6 jest zapasowy, służy do zasilania).
